Contactez-nous
The journey towards digital construction sites and intelligent mobile machines
How digitalization increases the uptime and productivity of your construction machines
Machinery and construction OEMs are seeking ways to leverage digital solutions to equip their customers with intelligent machines to increase the productivity of construction sites. As Komatsu puts it, “Thanks to technological advances such as the Internet of Things (IoT), it is now possible to bring, to an industry which met an almost null productivity increase those past 20 years, benefits of real-time job site information, as we would see in a manufacturing process.” 1 Many OEMs are already relying on smart digital tools to improve uptime, fuel efficiency, safety, and productivity. The interaction between man and machine, Operator Assistance Systems, and their automation, as well as Environment Detection and autonomous driving rank high on current R&D agendas. This expands the requirements for interdisciplinary system development, accounting for interactions in a complex environment, sensor data processing, as well as control concepts, and automation strategies.
Let’s talk about Digital Construction Sites and intelligent mobile machines and let’s make sense of where manufacturers, software vendors, and research stand today. I spoke to ESI’s own Dr. Julia Gundermann, an expert on the subject from our Research and Innovation team.
Denise: Julia, for the past three years you have been responsible for ESI’s part in the “Bauen 4.0” research project aiming to evolve the reality of Construction 4.0 in Germany. From what angle did you and the team approach the Digital Construction Site?
Julia: The Bauen 4.0 research project aimed at developing a digital 5G construction test site on which sustainable, productive machines intelligently interact with their environment. ESI was part of the biggest group in the consortium, which focused on automated and connected mobile machines. This group developed solutions for automation, assistance functions, remote control, environment recognition, and vertical integration.
Denise: And how did you do that?
Julia: The machine consortium had four real demonstrator machines, and partners with specific tools and/or knowledge for the named development goals. Mainly driven by TU Dresden, connectivity concepts at the machine and subsystem level were integrated, and a communication interface specifically for automation and monitoring software was developed. One application in the automation context, which was studied by different partners, was an autonomously driving wheel loader that adjusts its steering according to obstacles in nearby surroundings. During the project, we closely collaborated with OEMs and suppliers to make sure that our solutions met the market’s needs.
Latest research findings: How 3D environmental interaction extends system simulation for construction machinery
System simulation is a helpful tool for the modeling of multi-physical systems. It is a well-established method for developing operator assistance functions, control, and automation solutions, and autonomous driving systems for construction machines. Now, also interactions with the environment, specifically the locomotion on (driving) or modification of ground (digging), as well as the detection of the environment by sensors, can be simulated.
Denise: For the research project, you relied on ESI’s multi-physical system simulation software SimulationX. Why?
Julia: Automation algorithms should be developed and tested on a model of the machine, for clear reasons: tests and updates are repeatable, cheaper, and easier, and the real system is not at risk of getting damaged. Mobile machines are complex systems with components from different physical domains – mechanics, hydraulics, electronics, etc. The complexity in machine dynamics arises - at the latest - due to the interaction of the sub-systems from the different domains. The usage of system models, which cover all these domains in as much detail as necessary, is a conventional method for virtual testing. SimulationX is an established tool for system simulation and contains all necessary libraries as well as interfaces to be used in the virtual development and testing of automation algorithms. Of course, this is not the only application of system simulation in construction machinery.
Denise: What are the other possible applications of system simulation?
Julia: Especially in early development phases, engineers use the software to create prototype variants to study their functionality. They can examine the machine in terms of safety and performance, e.g., calculate the efficiency of the drive train. Engineers also apply system simulation to analyze the machine in the frequency domain, to investigate NVH (noise, vibration, harshness), or seat comfort.
Denise: I guess Bauen 4.0 would probably not be called a research project if all functionalities were already available and applied to existing machines, right?
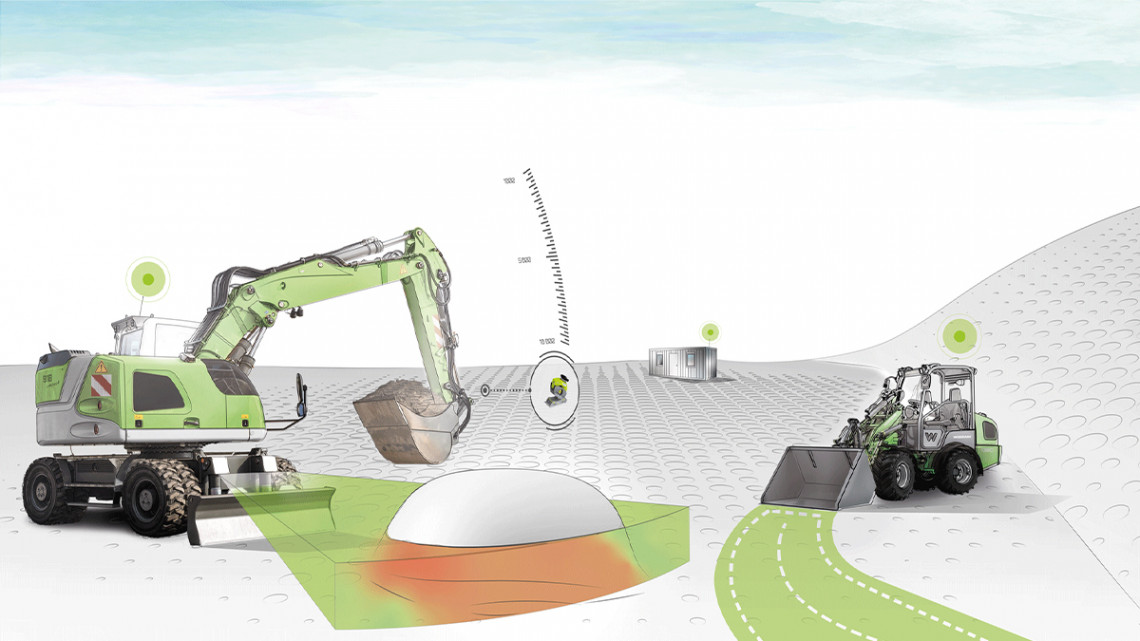
Julia: That’s right. There were indeed some major functionalities missing in the available system simulation software. For instance, to date, interactions with the environment have not been sufficiently represented. One important part of the environment is the ground on which the vehicle drives (we call this locomotion), which it hits with the bucket, or which it modifies when digging. For the assisted or automated motion of a construction machine, algorithms for digging, driving, steering, or wheel slip regulation on uneven ground are developed. But then, also the tool in which you test them must be prepared to model that ground interaction.
Also, part of the environment is all the details of the surroundings that can be detected by sensors, for example, the ground surface with slopes and holes, but also obstacles, other vehicles, and construction site workers. This information could be an input to an assistance function. For example, a sensor could detect a construction site worker passing by, or another obstacle, and trigger an emergency brake. This was not possible in the simulation but would still be a required functionality to enable a true digital construction site.
Denise: Very interesting information. I’d like to dig a bit deeper into the locomotion and ground modification topic. An output of the research project is the supplementation of functionalities with which you could simulate construction machinery models running on uneven ground. Can you tell me more about this?
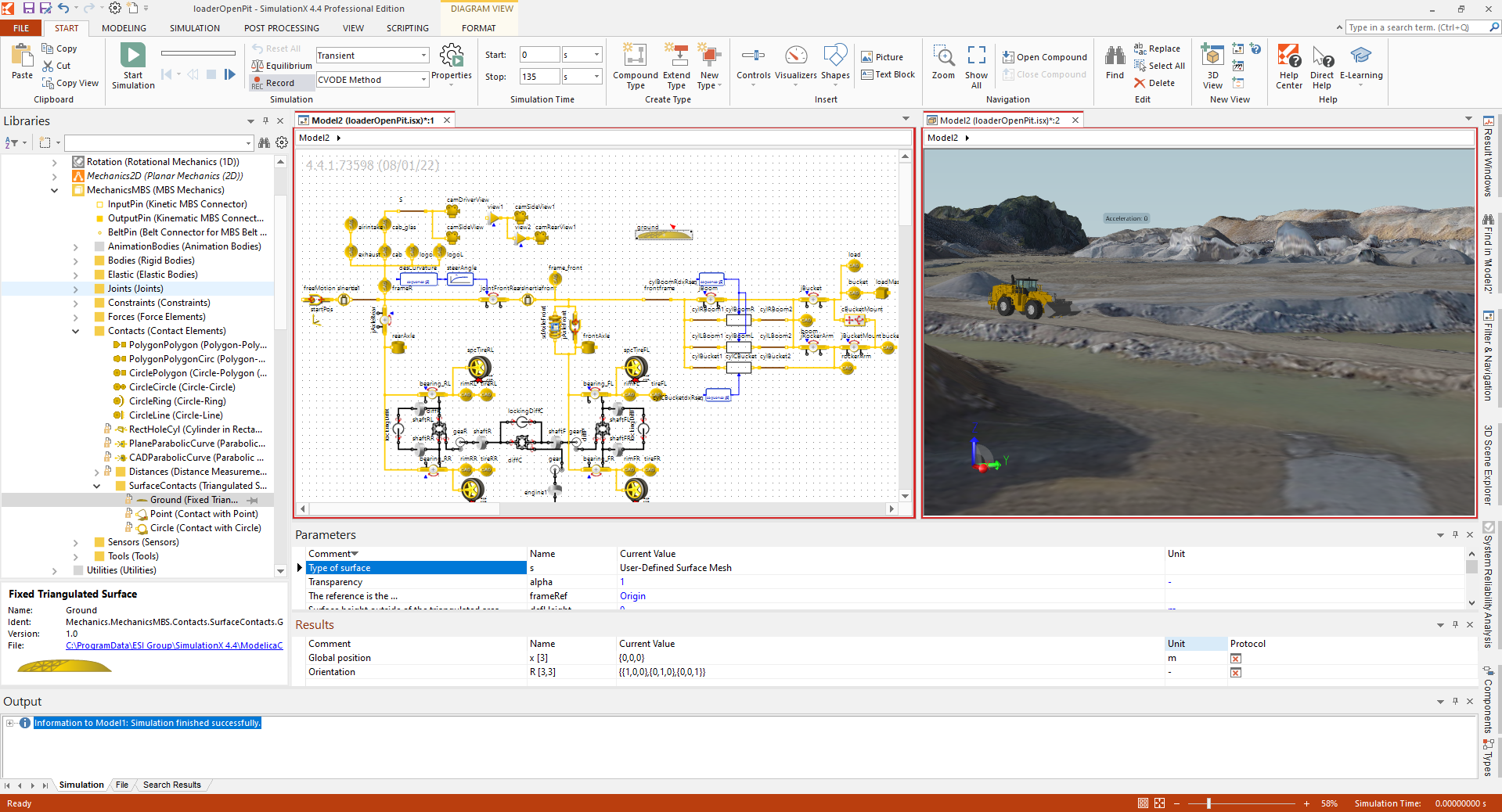
Julia: Sure. As I said, the system simulation software we use is SimulationX, for which we developed a new “surface contacts library” that enables engineers to model contacts between points or circles and a surface. The latter can be parametrized with a *.obj file, which means it is described by a mesh of triangles. We also developed a new tire model, which uses the contact detection of the circle with the ground, and hence drives on uneven ground. I brought a short video that contains a wheel loader driving over an uneven surface. The wheels of the loader use the new tire model, and the corners of the loader’s bucket contain point contact elements.
Denise: A new tire model? Can you tell me more about it?
Julia: Yes, we developed a new parametric tire model. Parametric means that it is based on equations and curves for the parameters, which makes it fast. One advantage is, that it comes with the Driving Maneuvers module in SimulationX 4.4 and offers a reasonable tire model without extra cost for the user. As I mentioned before, users can parametrize the tire based on curves and don't need an extra tire file.
But ever since we found out that customers sometimes prefer the tire models they use, we also implemented interfaces to two established tire models – Siemens Simcenter™ Tire and cosin FTire. Both have their range of applications, e.g., FTire is well suited for high frequency and short wavelength excitations.
Denise: Let’s briefly go back to the sensor detection. What was the outcome there?
Julia: To solve this task efficiently, we coupled our system simulation software to the 3D engine ‘Unity’ via DDS (data distribution service) as the communication middleware. We used Unity because it offers a lot more options to model the surroundings, including other objects and their surface properties, and sensors. And we used DDS since we wanted to include other software tools in the future, e.g., external controllers. Eventually, we had a SimulationX wheel loader driving through a Unity terrain. However, we realized that in some situations, in a co-simulation, both tools have to communicate synchronized, which becomes very hard to enforce using DDS. At some point, we had to stop investigating this issue to not lose sight of the other project goals.
Denise: That’s typical - things usually end just when they start to groove and become exciting! It was a real pleasure talking to you. And thank you for sharing how system simulation can facilitate a “digital build experience” for manufacturers of construction 4.0 machines.
Julia: It was my pleasure. Anyone interested to see the digital test construction site in reality and hear about the project results live, I warmly welcome you to join us on September 28, 2022, for the live demonstration.
About Julia

Julia Gundermann is Senior Research & Innovation Specialist and joined ESI Germany back in 2014. Since then, she has been responsible for different research projects in the field of system simulation, working on system reliability analysis, collision detection, and interface development. Since 2019 she is heading the Bauen 4.0 project at ESI, which runs until December 2022. Julia holds a Ph.D. in physics from the Technical University of Dresden.
Trademark notice: These materials are not sponsored by or affiliated with Unity Technologies or its affiliates. “Unity” is a trademark or registered trademark of Unity Technologies or its affiliates in the U.S. and elsewhere. https://unity.com/
1 https://www.komatsu.eu/en/smart-construction/customer-journey

Author
Denise Börner
Sr. Marketing Content Specialist
Denise is a seasoned media and communication professional with over 15 years of experience in the IT industry, spanning logistics and asset management software to system simulation and virtual prototyping (CAE & PLM). With a deep passion for technological innovation and sustainability, Denise is a steadfast ambassador and fervent advocate for Virtual Prototyping, utilizing her extensive expertise to steer companies through the conundrum of terminology in the era of digital and AI. As the Sr. Marketing Content Specialist at ESI, Denise creates insightful publications that help businesses understand the technologies, methodologies, and value of shifting from physical to virtual prototype testing – a transition that is facilitated through the utilization of CAE software, augmented with immersive tools and hybrid AI technologies.
Category: Digital Transformation, Heavy Machinery