お問合せ
電動垂直離着陸機(eVTOL)の仮想認証を加速する方法
次世代空中移動車両における包括的な検証と確認を支援するデジタルスレッドの作成

現在の航空宇宙ライフサイクルの課題は、連続的なエンジニアリング、認証、分散/共同開発、統合された検証プラットフォーム、ホモロゲーション、および堅牢な運用性能などを含みます。これらの課題に対処するには、包括的で信頼性の高い、トレーサブルで繰り返し可能、カスタマイズ可能な仮想環境での情報に基づいた意思決定が必要です。インテグレーターとサプライヤー間の緊密な協力体制と、高い安全水準の必要性は、各意思決定とその基盤となる成果物を追跡できる能力を求めます。この能力は、どんなエンジニアリングプラットフォームにとっても重要な価値となります。
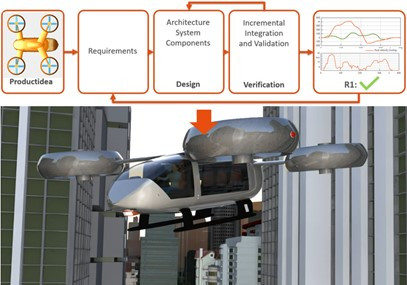
添付の図に示されているように、シミュレーションベースのeVTOL認証クレジットの例に焦点を当てて、ESIのミドルウェアアプローチを紹介し、デジタルスレッドを可能にし、サポートし、製品開発チームに早期の規制適合性検証を行う機会を提供します。これにより、離陸検証やバッテリーの最大電荷負荷、またはコントローラーデザインなどのパフォーマンスの仮想テストができます。
eVTOL設計と認証のための5つの模範的なシステムレベル要件
さまざまな顧客や研究プロジェクトに携わってきた経験から、EASAやFAAなどの機関によって定義された認証基準は、新技術の導入による技術的な観点からだけでなく、高い安全水準による管理的な観点からも、どのeVTOLメーカーにとっても非常に厳しいものです。具体的な規制(MOC SC VTOLなどの提案)を見てみましょう。これらの規制は、最終的な認証のために満たす必要がある性能と安全性の要件を定義しています:
1. 離陸確認
「推力と駆動系の設計は、最大離陸重量1.6トン(ペイロードを含む)での離陸を可能にする必要があります。同時に、バッテリーおよび電気システムに対する最大電荷負荷を維持する必要があります。」
2. 最大耐熱試験
「適用された冷却システムは、最大負荷および最も不利な条件下でバッテリー内の安全な温度を少なくとも5分間維持する必要があります。」
3. 姿勢と運動制御のためのコントローラー設計
「自動飛行制御システムは、通常の運用および特定の環境条件下で、定義済みの軌道を許容範囲内の偏差20度および10 mで維持できる必要があります。」
4. バッテリーコンポーネントテスト
「ピーク電流(最大電流の5倍)に対するバッテリーの電圧降下は、200 V以下に保たれる必要があります。」
5. モーター故障時の緊急着陸
「自動飛行制御システムは、単一ローターの出力喪失(20%)の異常な状況を検出し、特定の環境条件下で安全な緊急着陸を実行できる必要があります。」
システムシミュレーションとモデルベースの連続エンジニアリングプロセスによる認証への取り組み
同僚と一緒に、私は5月にフォートワース、テキサスで開催されたVFSフォーラム78でこのトピックについての論文を発表しました。これは、確立されたロータークラフトイベントです。模範的なeVTOLアーキテクチャを使用して、モデルベースのシステムエンジニアリング(MBSE)手法を適用し、新しい設計のサイジングとパフォーマンスをバーチャルに検証できるソリューションを紹介しました。
この点でのソリューションパートナーとしての主要な経験と発展は、CleanSky2プロジェクトMISSIONのコアパートナーとしての私たちの活動を通じて得られました。ESIは、航空宇宙設計プロセス内でシームレスに統合されたワークフローをサポートするソフトウェアツールチェーンの技術を開発してきました。これは、要件から認証までの航空機、システム、コンポーネントのさまざまなレベルおよびシステム統合に沿ったシステム分解です。私たちが提示した特定のユースケースを見る前に、現代の最大のエンジニアリング課題の1つ、つまりシステムとその基礎プロセスの複雑さについて簡単に振り返ってみましょう。
新技術の認証が一度でうまく行くことは、特に航空宇宙分野において複雑さを増大させる理由の1つです。
製品のパフォーマンスを確保し、市場投入前およびライフサイクル全体での振る舞いと安全性に対する信頼を確立することは、別の理由です。
最後に、次世代のメカトロニクスおよびサイバーフィジカルシステム自体の複雑さが増大し、OEMが持続可能で低排出量の新製品の開発とテストをますます仮想化するというコミットメントが、複雑さにさらなる複雑さを加えます。
これらの要因を管理できることが、システムエンジニアリングなどの方法論を定義する必要性を示しており、モデルベースの派生物が興味の対象となるシステムを包括的に考える方法に接近するためには、システムライフサイクル全体でシロを打ち破るためのしっかりとしたレベルの統合またはデータとプロセスの連鎖が必要です。そのため、現代の製品開発自体が、全てのレベルのエンジニアがバーチャルに指定し、定義し、シミュレートし、検証することによって、よく情報提供された意思決定を行うことができる包括的かつ継続的に参加するアプローチに向かって進化しています。
サンプルユースケース:連続的に統合された仮想eVTOLパフォーマンス設計と検証
新しい作業方法を見てみましょう。私たちのプレゼンテーションでは、同僚と私は、ツールに中立的なデジタルスレッド統合技術を適用し、MBSE方法論を実現し、すべてのeVTOLシステム要件の仮想検証を可能にし、開発時間とコストを削減しました。サンプルユースケースでは、都市空中移動(UAM)アプリケーション向けの意味のあるペイロードと耐久性を備えた半自律型eVTOLを設計することが目標とされ、安全性、性能、快適さに関する認証規制を満たすようになっています。
これは典型的な航空宇宙の例です:
- デザイン検証のための物理プロトタイプは非常に高コストで時間がかかります
- センサーデザイン(自律型UAM用)は、交通およびシナリオシミュレーション内で検証する必要があります
- シミュレーションベースの認証には、すべてのアーティファクト間の強力なトレーサビリティが必要です
高い安全レベルとエネルギー消費の見積もりなどのKPIを持つ複雑なシステムの認証クレジットは、統合的なシナリオベースのテスト(単一のシステムサイクルテストではなく「研究室のような」)を必要とします。そのようなユースケースは、マルチフィジックスシステムシミュレーションの完璧な応用例です。
私たちの例では、ESIのシステムモデリングソフトウェアSimulationXを活用しました(ツールに中立的な統合アプローチを提示したにもかかわらず)、ベースライン設計が離陸条件を満たさないことを実証しました。改良されたブレードエアロイと高い揚力対抗比を使用すると、改良された設計は離陸要件に合致しましたが、要求されたように緊急事態に対処できませんでした。最後に、特定の緊急事態に対する異なる動作モードを持つ拡張されたコントローラーを使用することで、最終設計はすべての要件を満たしました。
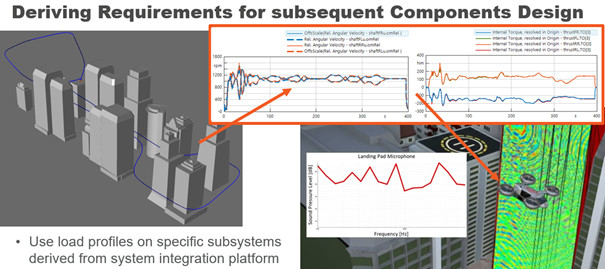
したがって、自動仮想テストによって検証されたいくつかの反復ループの後、システムアーキテクチャとサイジングを凍結し、全体のデジタルスレッドに伝播させることができました。製品開発ライフサイクルの観点から、主な設計決定およびアーキテクチャの探索やサイジングなどの分析タスクは、幾何学的なシミュレーションに基づいています。設計中のシステムの成熟度レベルが高まるにつれて、これらの結果は、特定のコンポーネントレベルの要件と荷重ケースに基づいた幾何学的な3D設計に供給されます。ESIのeVTOLデモでは、0Dから3Dの検証までのデータベース化された、管理された統合をサポートしました。総じて、私たちは内部および外部の騒音解析の例を使用して、パフォーマンスシミュレーション結果によって駆動されたチェーン化イニシアチブをサポートしました。
要約すると、ここで議論され、論文で示された包括的なモデルベースのエンジニアリングアプローチは、フルライフサイクルの一部を描写しており、システムアーキテクチャ、サイジング、およびパフォーマンスが定義される段階があります。これらは、初期段階でのバーチャル検証から最も恩恵を受ける重要なステップです。
この側面の分析は、さまざまな環境条件下で行われます。これは、物理的なプロトタイプテスト方法が十分に安全考慮をサポートできない場合に特に推奨されます。
さらに詳しく知りたいですか?
ベンダーニュートラルなマルチツールプラットフォームの実装は、モデルベースの統合技術を使用して、航空宇宙企業が仮想テストによる完全にトレーサブルで早期段階の要件検証を達成することを可能にします。システムシミュレーションソフトウェアを使用することで、エンジニアはどのような認証に関連する回答を得ることができますか? 以下のリンクから、私たちがここで共有したすべての洞察を得るために、私たちの技術論文をダウンロードしてください。こちら
著者
マルセル・ゴットシャル
シニアリサーチ&イノベーションスペシャリスト、システムシミュレーション
航空宇宙工学の学位を取得したマルセルは、ジェットエンジンの圧縮機の空力学(博士号)で成熟し、その後、ESIにシステムシミュレーションの研究員として参加しました。航空宇宙関連のモデリングとシミュレーションのトピックを担当しており、その研究活動の中心は、モデルベースのシステムエンジニアリング手法を適用したライフサイクル統合のトピックに不断に移行しています。CleanSky2 MISSIONなどのさまざまな資金提供プロジェクトの成果は、顧客プロジェクトやプロトタイプに直接フィードバックされ、マルセルは要件とワークフローの定義をサポートし、ESIのソリューションを既存のエコシステムにシームレスに統合するステークホルダーの視点を代表しています。

Author
Marcel Gottschall
Senior Research & Innovation Specialist, Systems Simulation
Graduated as an aerospace engineer, Marcel matured in compressor aerodynamics of jet engines (doctorate) before he joined ESI as a research associate for Systems Simulation. Still in charge of aerospace-related modeling and simulation topics, the core of his research activities moves continuously toward lifecycle integration topics applying model-based systems engineering methodology. Among various funded projects, like CleanSky2 MISSION, the outcomes feed directly into customer projects and prototypes for collaborative, continuous engineering platforms where Marcel represents the stakeholders' perspective supporting requirements and workflow definition to seamlessly integrate ESI solutions into established ecosystems.
Category: Aerospace